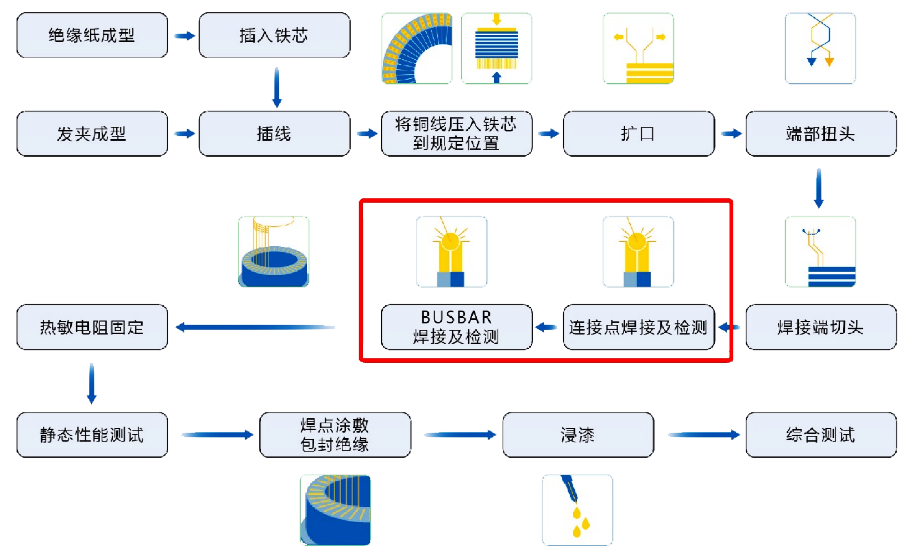
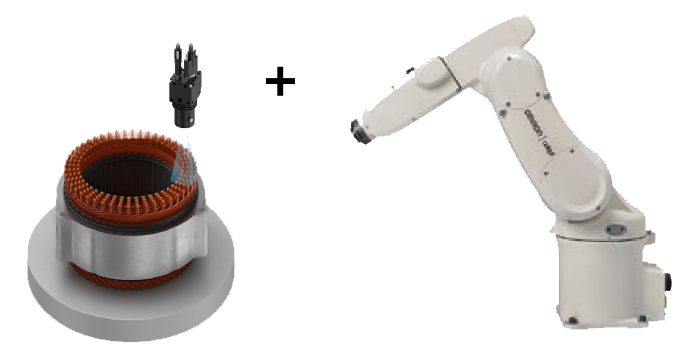
1、通过机器人走位实现大面积覆盖
先要,将观感像机、光照、焊枪,均装置在相同一台产品人上;随后,将4七个槽提成16等份,两遍查测3个槽中的16个焊点,确认产品人的走位技巧
(边活动边制作)来达成一个性、大建筑面积的覆盖住查测。
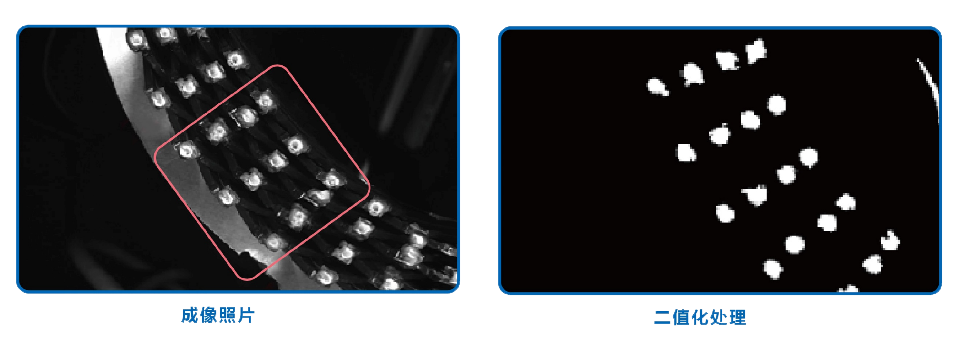
2、采用两种光源方案,实现准确检出
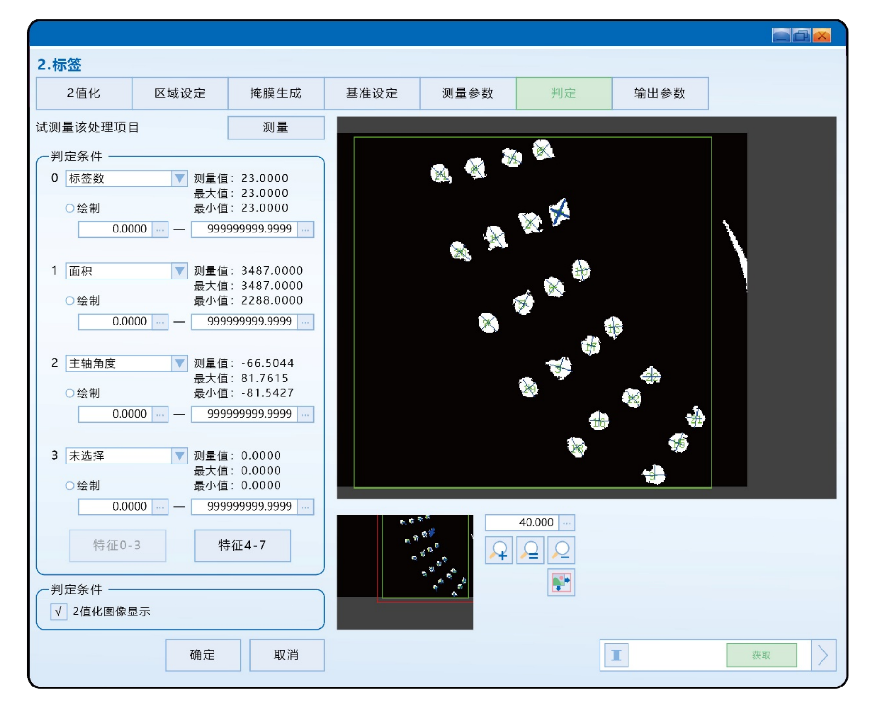
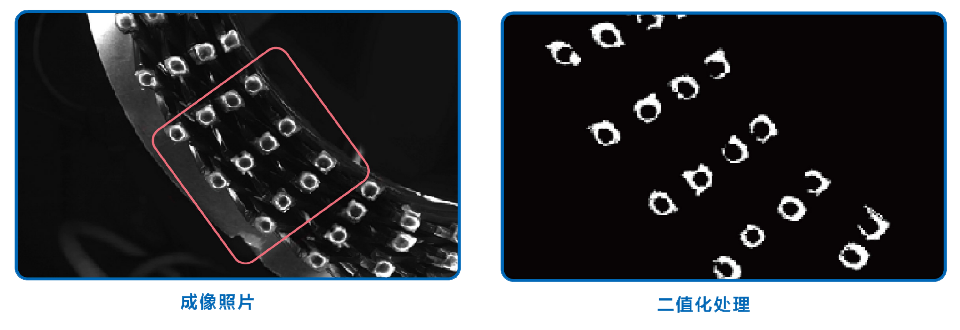
① 运用红的碗形灯源,椭圆圆形焊点顶上外壁受光平均且相对较值高,主要是用到焊点椭圆圆形焊点顶上线条的大小和图形的辨认。
② 应用橘红色多想法环行光,椭圆球状焊点边界受光竖直且的对比较高,其主要应用于焊点椭圆球状焊点边界轮廓线的总面积和形态的直接判断。
③ 两者黑与白完全选取,并按照PLC的掌控,开展两者黑与白的互相更替,同个地方各拍一页相片,同样开展判断。



 欧姆龙FA这个世界
欧姆龙FA这个世界