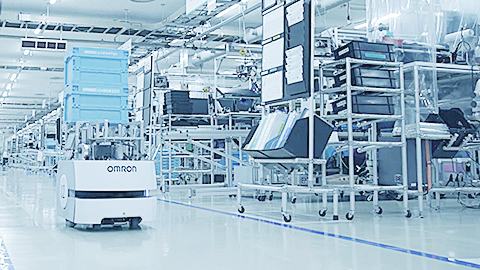
移动机器人自动搬运部件
人将精力投入提高产品价值的作业
使用单元测试生孩子增加多明细一定量生孩子的高效率,要有将需要备考部件在一定要的时着力送进有要的时光。即便某项上班至关比较重要,但并不是是与增加服务的的价值间接相应的的上班。绫部厂商传入随时升级行走的人的转思想器人,达到了货物运输上班的自然化。人和动物机气人共同协同,达到安全可靠货物运输,并能灵活性面对平面布置更改。所以直播上班员可以将元气投资增添的的价值高的业务,达到了3.5mm时的减少合在所制品销量的严控。
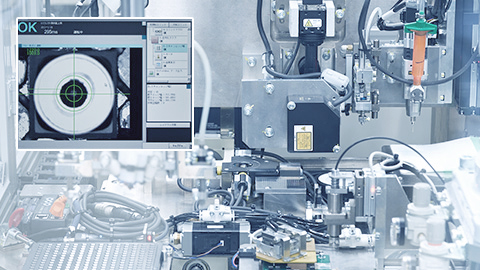
光学元件校准设备的预测性维护
让在最佳时机进行维护成为可能
光钎触觉器产量销售中的镜头时对位是关键投光效能的最重要程序。绫部车间完成IoT提取影像动态数据库解析报告和例如弧形等方法动态数据库解析报告,并将其大动态数据库解析报告化。于是完成解析这个动态数据库解析报告并自然测量角度差别,完成高品质平衡化。还有就是,完成AI传感器预先触觉折装用设施会发生发现问题和发现不好现状的预兆,方案应该对这个问题的預測性检修。将上前确定以启用时间间隔来菅理工作的定期进行检修,调成菅理工作设施的程序、在一定要时具体行政行为应该对的检修。就此将产量销售线的开始管理在面值最小最大,让随时检修当上概率。
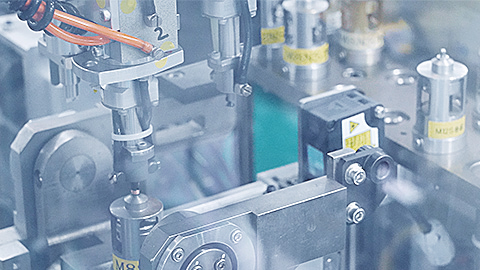
检测机械手微小的位置偏差
削减设备停止时间、减少部件损失
自然暖机中系统错识引发的的变慢(即“简短的为止”),是减轻启动率、高质量和不稳性的注重原因分析。绫部铸造厂用位移感应器器在线测量自然化生育方式线上支付机戒手前面部细微的位址变更。顺利通过监控特证量的的趋势变化英文,检查测量系统出错的征状相结行维修保养,未雨绸缪。以此严控系统错识引发生育方式线变慢的事件,直接减小零件毁损。
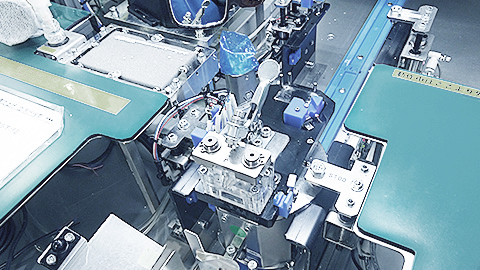
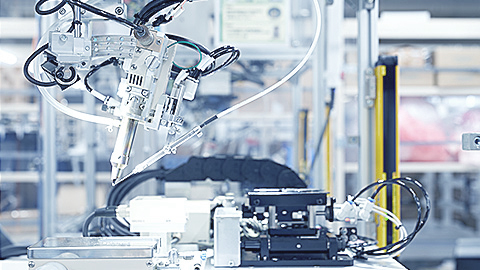
利用小型自走式搬运机器人进行搬运
以低成本实现工序间物料处理自动化
物品治理 是具代表会性的低叠加币值且不可一键化的做业。绫部厂里适用“中大型自走式装卸机子人”在道代加工过程间自主经营装卸,转变了道代加工过程间超材料装卸,仅以低生产投入转变了物品治理 的一键化。机子人运用了随须要灵活性高、枯燥地转变装卸路经的设计方案。根据追逐客制代加工系统的物品治理 一键化,和通过市售氟塑料导轨的低生产投入化,获得成功将装卸方面的系统生产投入压减了50%,并将设计方案/开发所需要的用时减短了20%。
将高难度的焊接作业机器人化
无技能化实现与熟练工同等的精度/速度
绫部PCB电路板工厂用机诫人实现目标目标了高一定的难度电弧焊接安全上班的自己化,这在从前是只要应具出众大招的炉火纯青工才被支持任职的运作。用飞速摄像机拍出炉火纯青工的安全上班,研究其活动,接线机诫人的舞蹈动作。实现目标目标产品率大约99.97%以上内容的高品行自己化,将从未过去了60天的的学习期大大减少为零。所以将炉火纯青工的判断力和技巧攻略等包括全人类的隐性相关基础知识,变为为就可以系统性化借助的显性相关基础知识,成就 将适用机诫的安全上班自己化。

 欧姆龙FA全球
欧姆龙FA全球