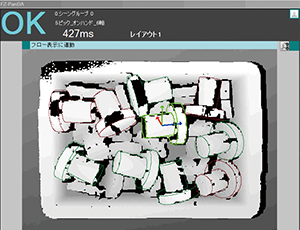
占用的作业空间与人相仿
FROM需要大幅改变生产现场布局
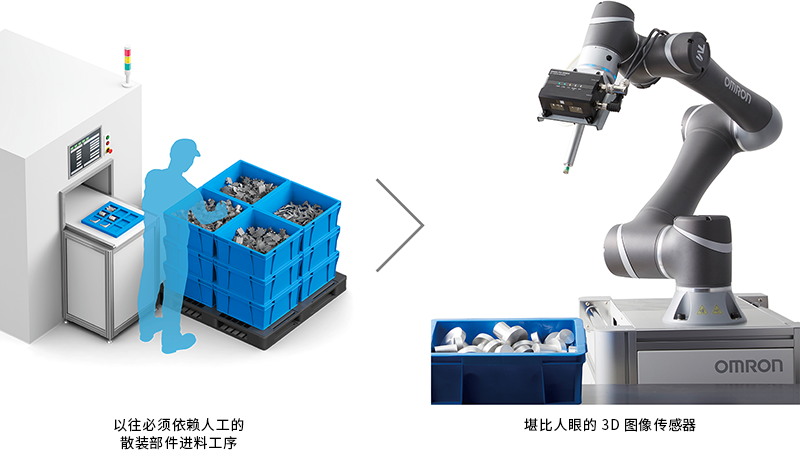
过去的 3D 图相感知器体态很大的,的配置时要起用魔幻机器设备,仅取决于增加了使用个人空间易于的配置,须要下跌变化方式 。
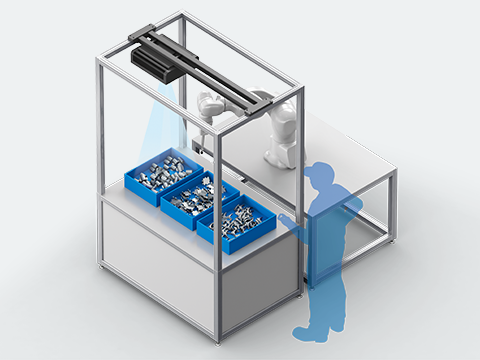
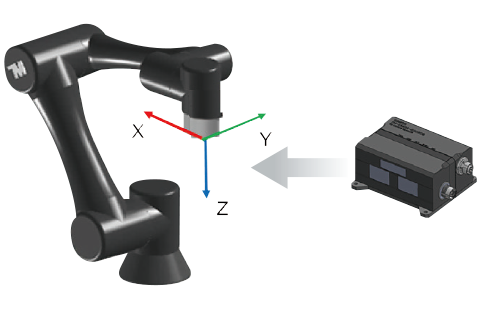
TO占用的作业空间与人相仿
专为轻数据量小形设备臂装修设计的 3D 视觉系统感知器,仅需人和人之间差不多的安转前景。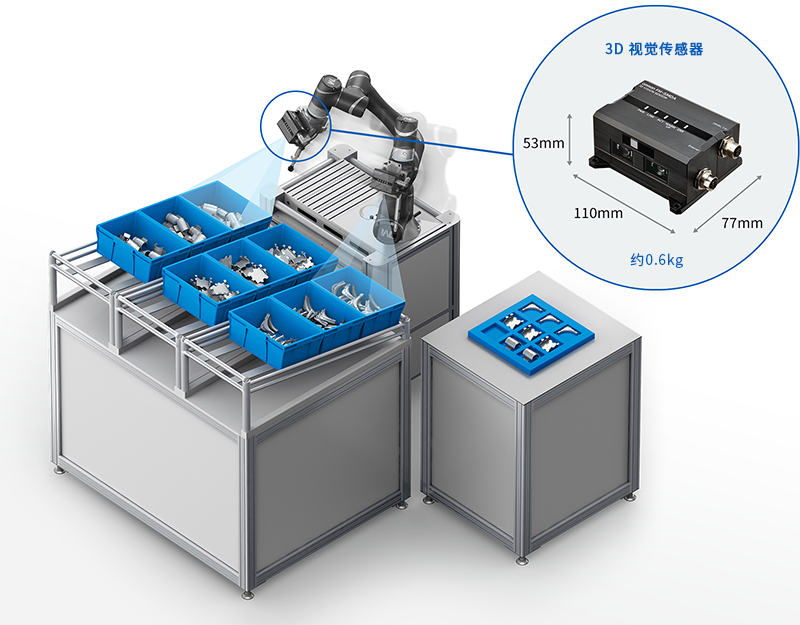
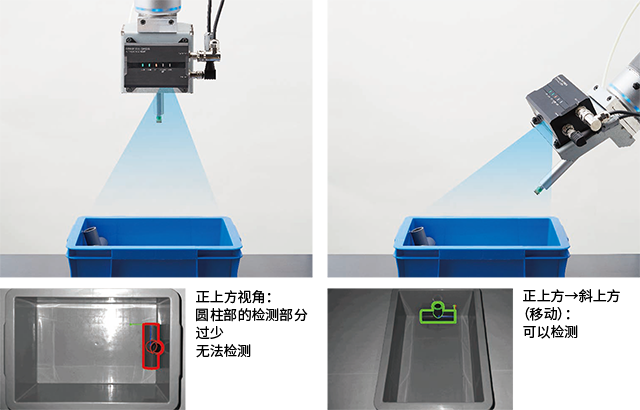
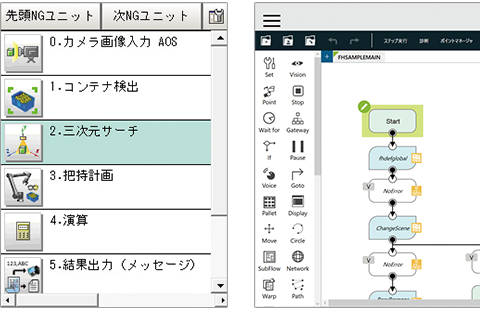
灵活拣选
打配机械设备人运行,是可以分拣分离在包装箱和展柜上的主件,像人这样灵活性高。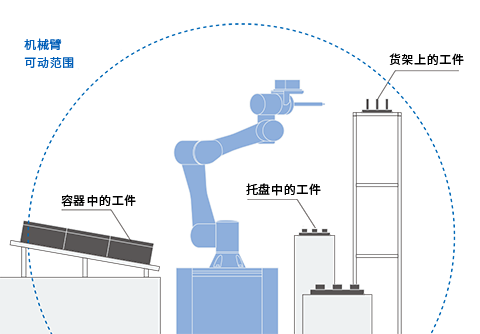
轻松移动
借助于适配 3D 视觉效果调节器器的机戒臂、协同工具人和猪挪动手机的服务中心,这类挑拣系统化可基于施工作业在什么地方,灵活性高地做挪动手机及布局图进行调节。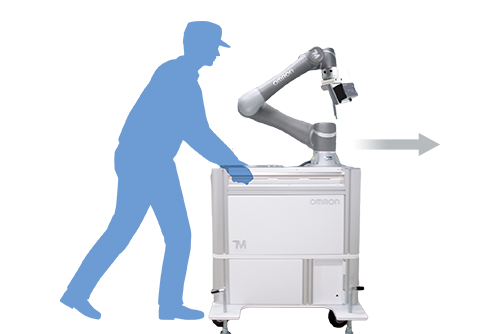


 欧姆龙FA地球
欧姆龙FA地球